FreeRTOS
任务管理
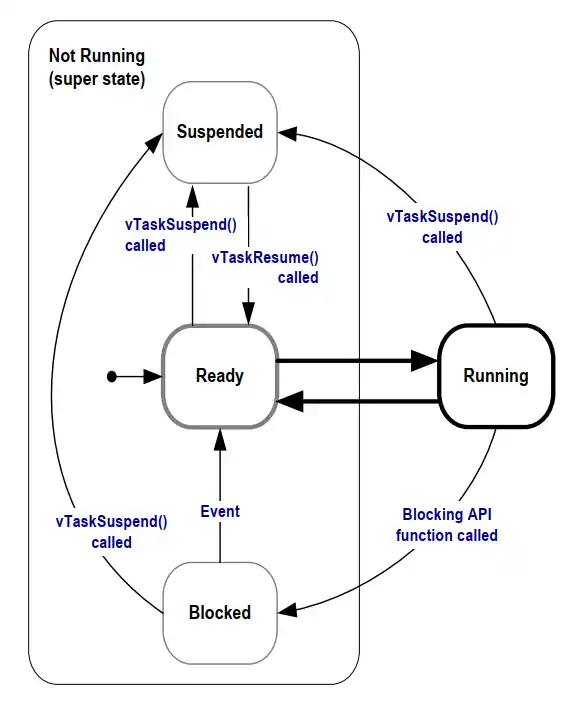
在任何时刻,只有一个任务可以处于运行状态!
FreeRTOS 是一个抢占式的实时多任务系统,其任务调度器也是抢占式的。高优先级的任务可以打断低优先级任务的运行而取得 CPU 的使用权,这样就保证了那些紧急任务的运行,我们就可以为那些对实时性要求高的任务设置一个很高的优先级。高优先级的任务执行完成以后重新把 CPU 的使用权归还给低优先级的任务。
任务函数一般包含一个死循环:
void TaskFunction(void *pvParameters) {
int iVariableExample = 0; // 任务实例独属的变量
for(; ; ) {
/* 完成任务功能 */
}
vTaskDelete(NULL); // 跳出死循环,删除任务(传入NULL默认删除当前任务)
}
创建任务
xTaskCreate()函数
// task.h
BaseType_t xTaskCreate( TaskFunction_t pxTaskCode,
const char * const pcName,
const configSTACK_DEPTH_TYPE usStackDepth,
void * const pvParameters,
UBaseType_t uxPriority,
TaskHandle_t * const pxCreatedTask ) PRIVILEGED_FUNCTION;
/*
* @return pdTRUE 任务创建成功
errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY 内存堆空间不足,无法创建任务
*/
pvTaskCode:指向任务实现函数的指针(函数名)
任务通常是一个永不退出的C语言函数,用死循环实现。
pcName:(FreeRTOS不使用)用于辅助调试usStackDepth:任务创建时,内核为它分配的栈空间大小,单位为字(word)
在32位微型处理器中,一个字由4字节组成。比如32位宽的栈空间,
usStackDepth=100,则分配\(400B\)的栈空间。应用程序在
FreeRTOSConfig.h文件中定义常量configMINIMAL_STACK_SIZE决定空闲任务的栈空间大小。
pvParameters:传递到任务中的值uxPriority:决定执行任务的优先级,从最低0到最高configMAX_PRIORITIES-1
configMAX_PRIORITIES在FreeRTOSConfig.h中定义,值越大,内核消耗的内存空间越多。
如果
uxPriority大于configPRIORITIES,则自动封顶为最大合法值。如果多个任务优先级相同,调度器会让这些任务轮流执行,每个任务执行一个时间片,在时间片起始时刻进入运行态,在时间片结束时刻退出运行态;在
FreeRTOSConfig.h文件中定义的configTICK_RATE_HZ表示tick的频率,时间片长度为1/configTICK_RATE_HZ。
pxCreatedTask:传出任务的句柄,在API调用中对创建出的任务进行引用(比如改变优先级、删除任务)
代码示例见FreeRTOS实时内核使用指南P10~20.
任务状态
/*
* Blocking API function e.g.
* 代替(忙等待)的空循环,让任务在延迟期间进入阻塞态,可以去调度其它任务
* @param xTicksToDelay 延迟tick周期数 = 延迟时间 / portTICK_RATE_MS
*/
void vTaskDelay( const TickType_t xTicksToDelay ) PRIVILEGED_FUNCTION;
void xTaskDelayUntil( TickType_t * const pxPreviousWakeTime,
const TickType_t xTimeIncrement )
代码示例见FreeRTOS实时内核使用指南P24, 28, 29~30.
vApplacationIdleHook函数
FreeRTOSConfig.h中的常量configUSE_IDLE_HOOK定义为1时,Hook函数才会被调用。
vTaskPrioritySet函数
用于在调度器启动后改变任务的优先级。
pxTask:任务句柄,pxTask=NULL表示自身uxNewPriority:目标优先级
vTaskPriorityGet函数
vTaskDelete函数
/*
* 内核为任务分配的内存空间会在删除后自动回收,任务1自己占用的内存或资源需要应用程序显式释放
* @param pxTaskDelete 待删除任务句柄
*/
void vTaskDelete(xTaskHandle pxTaskToDelete);
代码示例见FreeRTOS实时内核使用指南P36~37, 39~40.
队列管理
创建队列
创建队列时,RTOS从堆空间中分配内存空间,如果堆中空间不足,函数返回NULL
/*
* @param uxQueueLength 队列深度
* @param uxItemSize 队列中数据单元的长度
* @return NULL 堆空间不足;非NULL,返回队列句柄
*/
xQueueHandle xQueueCreate(unsigned portBASE_TYPE uxQueueLength, unsigned portBASE_TYPE uxItemSize);
写入函数
/*
* @param xQueue 目标队列句柄,xQueueCreate函数的返回值
* @param pvItemToQueue 发送数据的指针(按uxItemSize复制对应长度)
* @param xTicksToWait 阻塞超时时间,队列满时,任务处于阻塞态等待队列空间有效的最长等待时间
* xTicksToWait = time / portTICK_RATE_MS
* @return pdPass 超时前数据成功入队
* errQUEUE_FULL 队列已满
*/
portBASE_TYPE xQueueSendToFront(xQueueHandle xQueue, const void * pvItemToQueue, portTickType xTicksToWait);
portBASE_TYPE xQueueSendToBack(xQueueHandle xQueue, const void * pvItemToQueue, portTickType xTicksToWait);
读出函数
/*
* 出队
* @return pdPASS 读取成功
* errQUEUE_EMPTY 队列已空,读取失败
*/
portBASE_TYPE xQueueReceive(xQueueHandle xQueue, // 被读队列的句柄
const void * pvBuffer, // 接收缓存指针(指向的内存空间等于数据单元大小)
portTickType xTicksToWait // 阻塞超时时间
);
// 与出队不同,不删除被接收的数据单元
BaseType_t xQueuePeek(xQueueHandle xQueue, const void * pvBuffer, portTickType xTicksToWait);
- 如果设定
xTicksToWait=portMAX_DELAY,并且在文件FreeRTOSConfig.h中设定INCLUDE_vTaskSuspend=1,则阻塞等待无时间限制。
查询函数
/*
* @param xQueue 被查询队列的句柄
* @return 返回队列中保存的数据单元的个数
*/
unsigned portBASE_TYPE uxQueueMessageWaiting(xQueueHandle xQueue);
taskYIELD();函数用于立刻进行任务切换,不必等到时间片耗尽。
例如,两个任务的优先级相同,一个任务调用了taskYIELD();函数,立刻由运行态进入就绪态,另一个任务进入运行态。
代码示例见FreeRTOS实时内核使用指南P54~65
中断管理
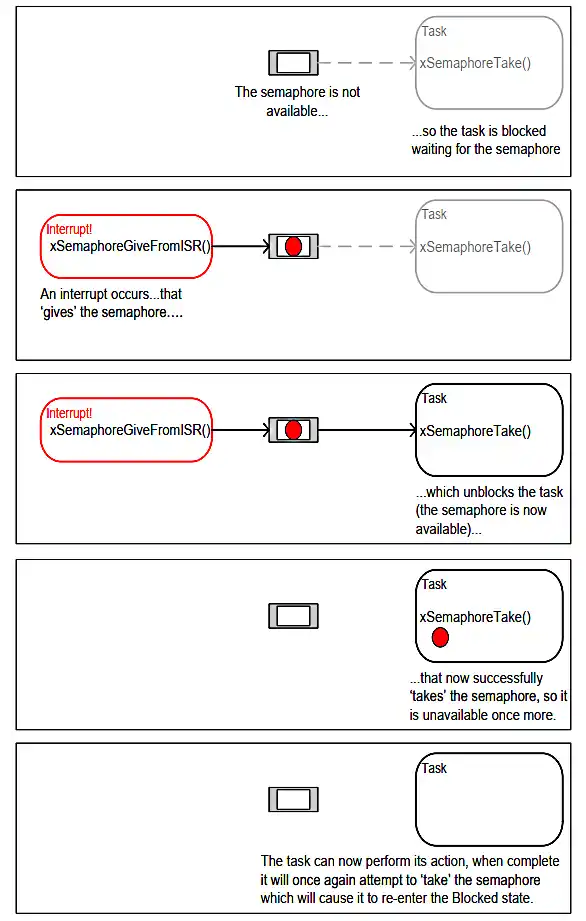
二值信号量
创建二值信号量
/*
* @param xSemaphore 创建的信号量,直接传入值,而不是传址
*/
void vSemaphoreCreateBinary(xSemaphoreHandle xSemaphore);
xSemaphoreTake函数
/*
* @param xSemaphore 获取的信号量
* @param xTicksToWait 阻塞超时时间(任务进入阻塞态等待信号量有效的最长时间)
* = time / portTICK_RATE_MS
* @return pdPASS 成功获得信号量
* pdFALSE 未获得信号量
*/
portBASE_TYPE xSemaphoreTake(xSemaphoreHandle xSemaphore, portTickType xTickToWait);
xSemaphoreGiveFromISR函数
除了互斥信号量外,其它类型的信号量可通过调用xSemaphoreGiveFromISR给出
/*
* @param xSemaphore 给出的信号量
* @param pxHigherPriorityTaskWoken 调用本函数会使一个任务退出阻塞态,如果该任务优先级高于先前被中断的任务,pxHigherPriorityTaskWoken=pdTRUE,在中断退出前进行一次上下文切换
* @return pdPASS 调用成功
* pdFALL 信号量已经有效,无法重复给出
*/
portBASE_TYPE xSemaphoreGiveFromISR(xSemaphoreHandle xSemaphore, portBASE_TYPE *pxHigherPriorityTaskWoken);
代码示例见FreeRTOS实时内核使用指南P76~79.
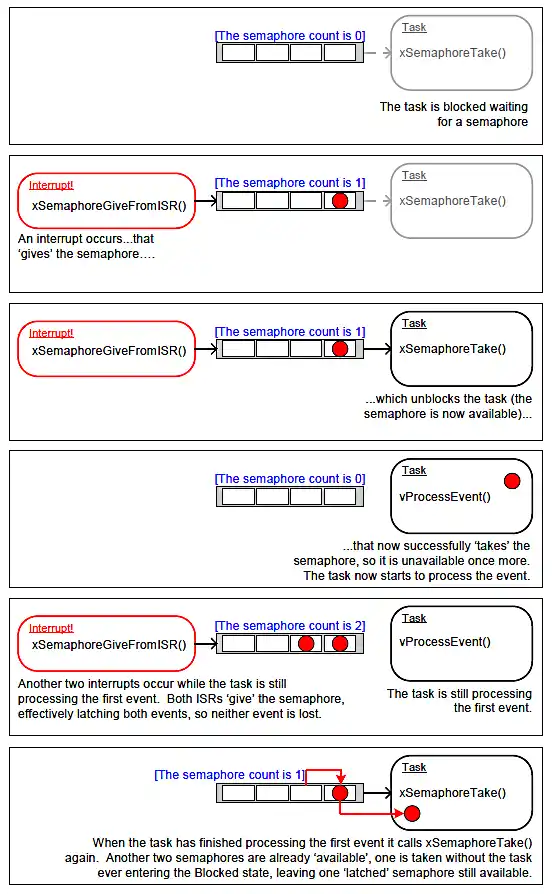
计数信号量
一个二值信号量最多只可以锁存一个中断事件(0/1),在锁存的事件未被处理之前,如果还有中断发生,后续的中断事件将会丢失。采用计数的方式代替二值信号量,丢中断的情况可以避免。
-
事件计数:如图,每次事件发生时,中断服务例程都会
Give一次信号量,计数值加1.延迟处理任务每处理一个任务都会Take一次信号量,计数值减1,。最终信号量的计数值等于已发生事件与已处理事件数目的差值。 -
资源管理:用信号量的计数值表示可用资源的数目,可以实现资源管理(详见下节)。
创建计数信号量
/*
* @param uxMaxCount 最大计数值(信号量队列的深度)
* @param uxInitialCount 初始计数值
* - 事件计数:0 资源管理:uxMaxCount
* @return NULL 堆空间不足,信号量分配内存失败
* !NULL 信号量创建成功,返回信号量句柄
*/
xSemaphoreHandle xSemaphoreCreateCounting(
unsigned portBASE_TYPE uxMaxCount,
unsigned portBASE_TYPE uxInitialCount
);
代码示例见FreeRTOS实时内核使用指南P85~86
中断服务例程中使用队列
信号量用于事件通信,队列不仅可以事件通信,还可以传递数据。
xQueueSendToFrontFromISR, xQueueSendToBackFromISR, xQueueReceiveFromISR是中断安全版本,用于中断服务例程中,函数在ISR中被调用时,不会等待队列空间可用或处理队列满的情况,因此不需要指定阻塞超时时间xTicksToWait;相反,它会立即返回一个状态码,指示是否成功发送消息或是否需要进行上下文切换。
/*
* @param xQueue 目标队列句柄,xQueueCreate函数的返回值
* @param pvItemToQueue 发送数据的指针(按uxItemSize复制对应长度)
* @param pxHigherPriorityTaskWoken 调用本函数会使一个任务退出阻塞态,如果该任务优先级高于先前被中断的任务,pxHigherPriorityTaskWoken=pdTRUE,在中断退出前进行一次上下文切换
* @return pdPass 超时前数据成功入队
* errQUEUE_FULL 队列已满
*/
portBASE_TYPE xQueueSendToFrontFromISR(xQueueHandle xQueue, void * pvItemToQueue, portBASE_TYPE *pxHigherPriorityTaskWoken);
portBASE_TYPE xQueueSendToBackFromISE(xQueueHandle xQueue, void * pvItemToQueue, portBASE_TYPE *pxHigherPriorityTaskWoken);
/*
* @return pdPASS 读取成功
* errQUEUE_EMPTY 队列已空,读取失败
*/
portBASE_TYPE xQueueReceiveFromISR(
xQueueHandle xQueue, // 被读队列的句柄
const void * pvBuffer, // 接收缓存指针(指向的内存空间等于数据单元大小)
portTickType xTicksToWait // 阻塞超时时间
);
代码示例见FreeRTOS实时内核使用指南P89
资源管理
临界区与挂起
基本临界区
临界区会关掉中断(关掉优先级低于configMAX_INTERRUPT_PRIORITY的中断)在ENTER与EXIT之间执行时不会切换到其它任务
挂起
如果一个临界区太长,不适合简单地关中断实现,可以考虑使用挂起调度器。
挂起可以停止上下文切换而不用关中断,如果某个中断在调度器挂起过程中要求上下文切换,则这个请求也会被挂起,直到调度器被重新唤醒。
void vTaskSuspendAll(void); // 挂起调度器
/*
* @return 如果一个挂起的上下文切换请求在xTaskResumeAll()返回前执行,返回pdTRUE,否则返回pdFALSE
*/
portBASE_TYPE xTaskResumeAll(void);
互斥量
感觉类似于多线程编程中的互斥锁
互斥量是一种特殊的二值信号量,单词MUTEX来源与"MUTual EXclusion"
- 用于互斥:用后必须归还;
- 用于同步:完成同步后丢弃;
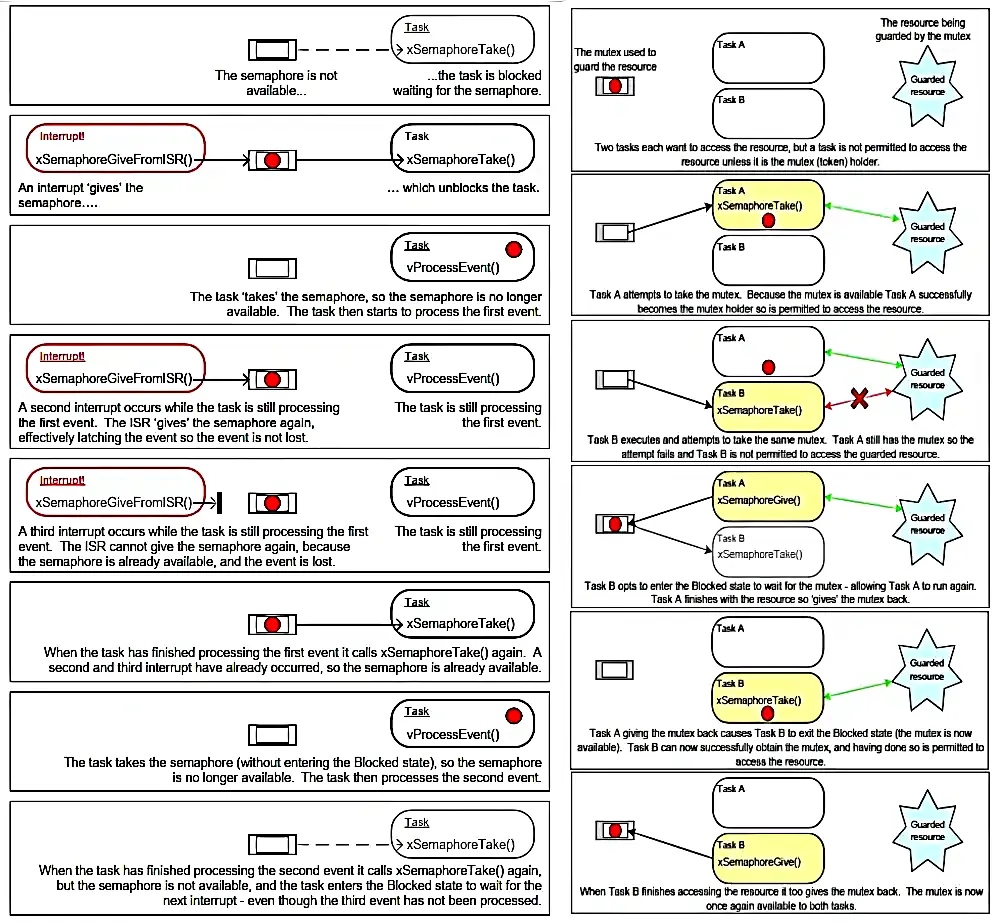
xSemaphoreCreateMutex函数
代码示例见FreeRTOS实时内核使用指南P108~111.
守护任务
优先级反转
低优先级任务拥有互斥量的时候,优先级会被临时提高,提高到和高优先级任务相同的优先级。如果另一个高优先级任务也想获取这个信号量,必须要等待互斥量被释放,否则高优先级任务将不能获取这个互斥量,并且那个拥有互斥量的低优先级任务也永远不会被剥夺。
为了避免优先级反转和死锁,规定守护任务是对某个资源具有唯一所有权的任务。
只有守护任务才可以直接访问其守护的资源,并且其它任务要访问时只能间接通过守护任务提供服务。
内存管理
标准的
malloc()函数和free()函数可能会有以下问题:
- 在小型嵌入式系统中不可用;
- 具体实现较大,占用代码空间;
- 不具备线程安全特性;
- 每次调用的时间开销可能不同;
- 可能会产生内存碎片;
- 使链接器配置复杂;
当内核请求内存时,调用pvPortMalloc()函数而不是malloc()函数;当释放内存时,调用vPortFree()函数而不是直接调用free()函数。
代码详见FreeRTOS\Source\portable\MemMang\heap_1,2,3.c,FreeRTOS实时内核使用指南P123~126.
参考资料
- FreeRTOS实时内核使用指南
-
Mastering the FreeRTOS™ Real Time Kernel
- 朱工的专栏—FreeRTOS高级篇